![]()

| Certifico: Informazione tecnica HSE / 25° anno / Documenti disponibili: 43.358 / Totale documenti scaricati: 30.086.353 Vedi Abbonamenti, Prodotti tecnici e Software 2025 * Dati in real-time da Aprile 2014 alla data odierna. |

| Certifico 2000/2024: Informazione Utile / Documenti disponibili: 43.358 * / Totale documenti scaricati: 30.086.353 * Vedi Abbonamenti, Prodotti e Software 2024 * Dati in real-time da Aprile 2014 alla data odierna. |

| Certifico 2000/2024: Informazione Utile / Documenti disponibili: 43.358 * / Totale documenti scaricati: 30.086.353 * Vedi Abbonamenti Promo 2023 * Dati in real-time da Aprile 2014 alla data odierna. |

| Certifico 2000/2023: Informazione Utile / Documenti disponibili: 43.358 * / Totale documenti scaricati: 30.086.353 * Vedi Abbonamenti Promo 2023 * Dati in real-time da Aprile 2014 alla data odierna. |

| Certifico 2000/2023: Informazione Utile |

| Certifico 2000/2023: Informazione Utile |

| Certifico 2000/2023: Informazione Utile Abbonamenti Promo fino al 20 Agosto - 20% ticket "CERTIFICO20" Vedi Abbonamenti Promo: 2X, 3X, 4X, Full | 2023 |

| Certifico 2000/2023: Informazione Utile Abbonamenti Promo fino al 20 Agosto - 20% ticket "CERTIFICO20" Vedi Abbonamenti Promo: 2X, 3X, 4X, Full | 2023 |

| Certifico 2000/2023: Informazione Utile / Documenti disponibili: 43.358 * / Totale documenti scaricati: 30.086.353 * Vedi Abbonamenti Promo 2023 * Dati in real-time da Aprile 2014 alla data odierna. |


| Certifico 2000/2022: Informazione Utile Tutti i Software, Prodotti e Documenti Tecnici presenti sono elaborati direttamente o selezionati su Norme Tecniche & Standards riconosciuti. Vedi Abbonamenti Promo: 2X, 3X, 4X, Full | 2022 |

| Certifico 2000/2021: Informazione Utile Tutti i Software, Prodotti e Documenti Tecnici presenti sono elaborati direttamente o selezionati su Norme Tecniche & Standards riconosciuti. Vedi Abbonamenti Promo: 2X, 3X, 4X, Full | 2021 |
|
|
![]()

Documenti
Legislazione
Direttive Sicurezza
Timeline Sicurezza IT
D.Lgs. 81/2008
Interpelli
Soggetti abilitati
ATECO / Livello rischio
Cassazione
Convenzioni ILO
TUSSL / Link


Documenti
Legislazione
Testo Unico Ambiente
Interpelli ambientali
Elenco CER
RENTRi


Documenti
Legislazione
CLP consolidato
REACH Consolidato
Seveso III
PXXX | EUH | HXXX
Elenco gas tossici
Parametri acque

Documenti
Legislazione
Norme armonizzate Click
Direttiva click
Nuovo approccio


Attività PI
D.P.R. 151/2011
Moduli PI
Codice RTO II
Norme PI 2022
Decreti PI Sett. 2021


Documenti
Legislazione
Tremcards
Etichette ADR
Kemler

Regolamento macchine
Direttiva macchine
Documenti Regolamento
Norme armonizzate
CEM4 | Software

HACCP (CE) 852/2004
MOCA (CE) 1935/2004
GMP (CE) 2023/2006
MOCA - GMP consolidato
Food Safety book

Documenti
Legislazione
DM. n. 37/2008
Legge n. 10/1991

Norme armonizzate
Direttiva click
Prassi di riferimento
| Appunti Normazione | ||
|
23 Maggio 2025 |
||
| Salve Visitatore | ||
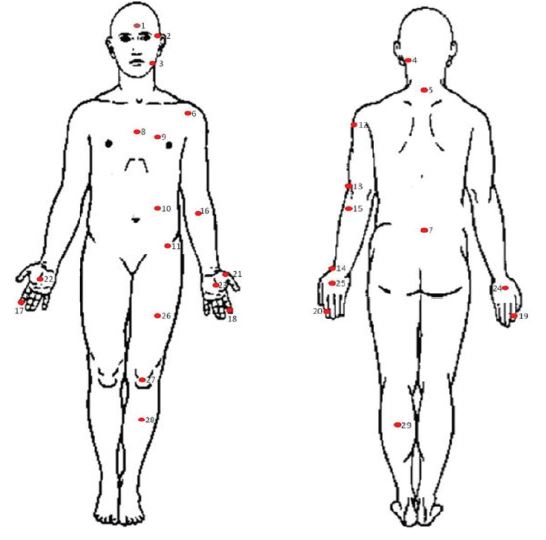
Robot collaborativi: VR forze di contatto con l'operatore Estratto dall'Appendice A della Specifica Tecnica ISO/TS 15066:2016 Ed. 1.0, specifica elaborata nell'ambito della ISO 10218-1/2 per l'importante sviluppo delle applicazioni con robot collaborativi. I robot collaborativi, sempre più diffusi, implementano applicazioni in cui le persone e sistemi robotizzati collaborano insieme, si possono ottenere vantaggi di produzione notevoli, ed anche vantaggi in termini di sicurezza (ergonomia in particolare), ad esempio miglioramenti della postura dell'operatore. L'obiettivo dei robot collaborativi è di combinare le prestazioni ripetitiva del robot con lo competenze individuali e la capacità dell'uomo. L'uomo ha una eccellente capacità di risolvere esercizi imprecisi; i robot hanno capacità di precisione, potenza e resistenza. Per raggiungere la sicurezza, le applicazioni robotiche tradizionali, escludono l'accesso dell'operatore alla zona di lavoro del robot. La ISO 10218-2:2011, in 5.11.5.5, richiede che i parametri di potenza, forza, e l'ergonomia di pertinenza dei sistemi robotizzati siano determinati da una valutazione del rischio.
Figura A.1 |
||
|
|
||
 |
||
| www.certifico.com
è un sito di INVIO NEWSLETTTER Se vuoi cancellarti dall'invio della newsletter oppure effettua il login al sito ed entra nella Tua Area Riservata, in “Modifica dati” agisci con la spunta sul box di selezione “Desidero ricevere la vostra newsletter”. L'Elenco completo di tutte le ns newsletter è qui: Archivio newsletter. |
||
  |
||
| Certifico Srl 2000-2016 | VAT IT02442650541 | ||